Signal Occlusion
Urban canyons, tunnels and vegetation degrade GNSS.

Solutions / Mobile Surveying
Tightly coupled GNSS/INS navigation maintains continuous survey trajectories through tunnels, vegetation and urban occlusion while synchronizing mapping payloads.
02
Key operating constraints that shape the solution architecture.
Urban canyons, tunnels and vegetation degrade GNSS.
Long routes require continuous motion constraints.
Cameras, LiDAR and IMU data need precise calibration.
03
A complete sensing, navigation and engineering stack.
IMU, GNSS, LiDAR and camera inputs.
High-accuracy GNSS/INS trajectory engine.
Smoothing, alignment and drift suppression.
Survey platform evaluation and integration kit.
Calibration, validation and deployment support.
04
Mission-ready modules matched to this operating environment.

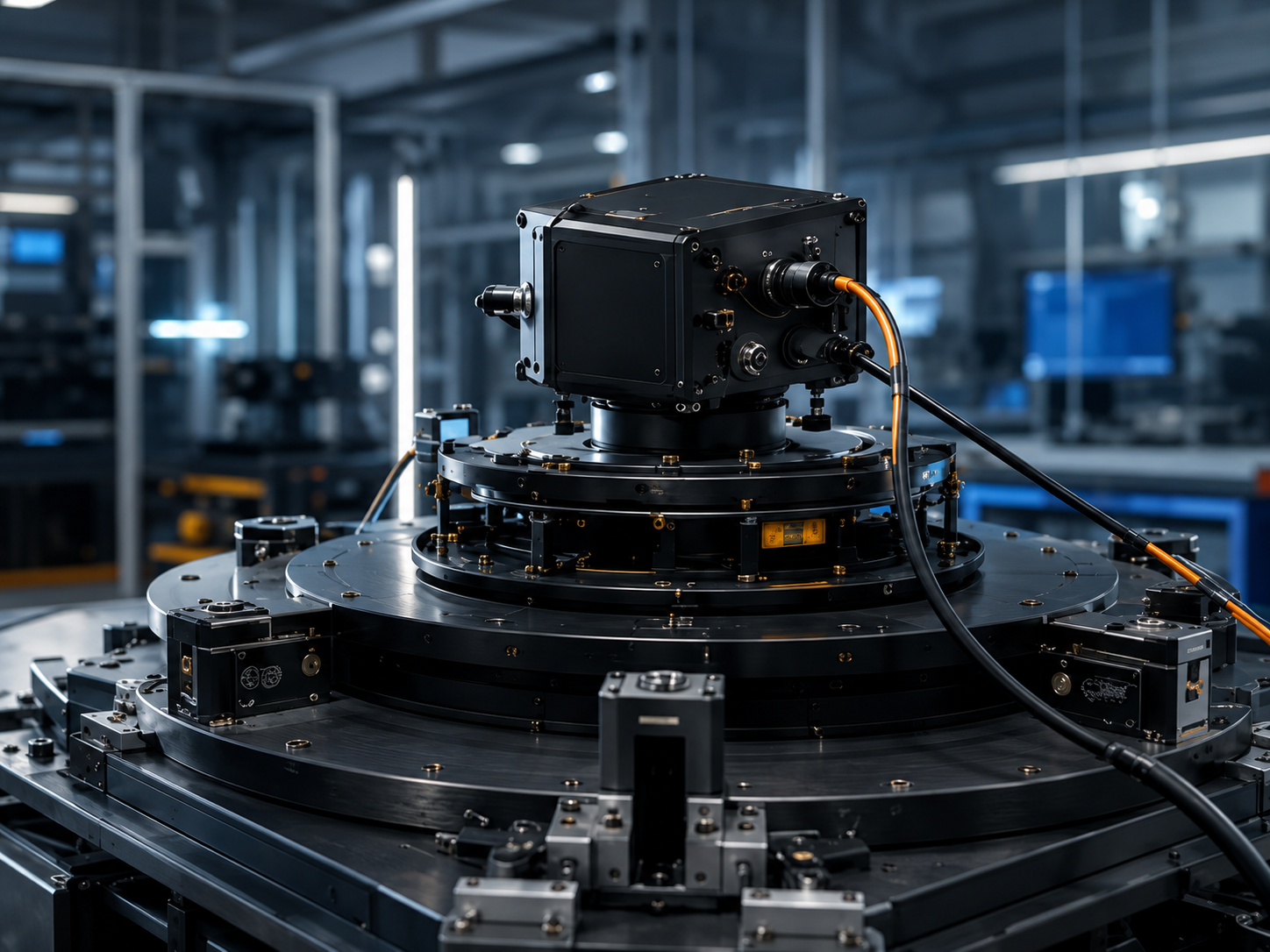
GNSS / INS Navigation System
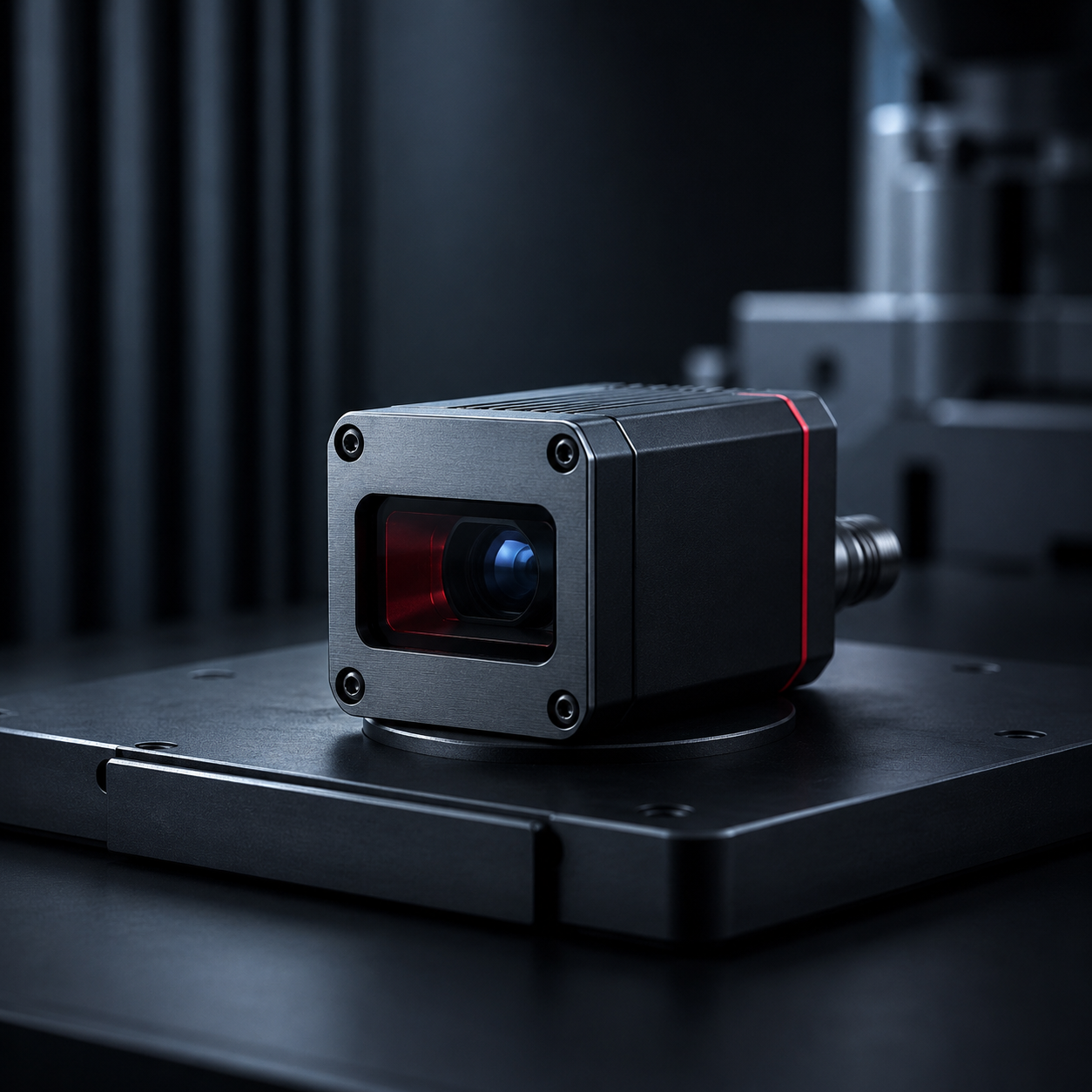
Laser Range Sensor

High-Performance IMU

Mobile Mapping Integration Kit
05
Core technologies supporting reliable sensing and navigation.
Robust trajectory generation in changing environments.
Spatial alignment for LiDAR, camera and IMU.
Consistent time base for mapping payloads.
Trajectory continuity through GNSS gaps.
06
Validation evidence across environment, navigation and lifecycle requirements.
Validated survey-grade position and attitude.
Stable routes through partial GNSS denial.
Tested with mapping payloads and compute modules.
07
Adjacent deployments with similar operating constraints.